

钱堃,男,1982年生,江苏南京人,工学博士。东南大学自动化学院副教授,博士生导师。2004年毕业于东南大学自动控制系,获工学学士学位,2010年博士研究生毕业于东南大学自动化学院(硕博连读),获工学博士学位,并留校任教。2014.7-8在美国Lehigh University学习访问;受国家留学基金委公派访问学者项目资助,2021.10-2022.4在英国利物浦大学、2022.4-2022.10在伦敦国王学院访问。2014-今,硕导;2017-今,博导。现属于机器人工程系,模式识别与智能系统学科组。
主要从事机器人感知与智能机器人系统技术方面的研究工作(详见研究兴趣)。近年来主持了国家自然科学基金项目2项、江苏省自然科学基金1项、广东省自然科学基金1项,参与了863重点项目1项、国家自然科学基金3项,国家重大科技专项课题1项、江苏省科技成果转化项目2项;承担了国家电网公司总部科技项目、海外项目等一批企业横向项目。研究成果发表在IEEE TCSVT、TIM、TCDS、ADVEI、RAS等国际期刊和ICRA、IROS等国际会议上,总计发表论文80余篇,其中第一作者或通讯作者SCI检索31篇。获得国家发明专利授权10项,申请国家发明专利6项,获得软件著作权6项。曾获得2017年中国自动化学会高等教育教学成果特等奖、全国首届教材奖二等奖。现为IEEE member、中国自动化学会会员、中国人工智能学会智能机器人委员会委员、江苏省自动化学会机器人竞赛工作委员会委员、江苏省发展改革委评审咨询专家。长期担任IEEE TRO、IEEE TIE、IEEE THMS、IEEE TIM、IEEE SENSORS JOURNAL、RAS、ADV ROBOTICS、J INTELL ROBOT SYST、NCAA、J BIONIC ENG、ICRA、IROS等国际期刊和会议的审稿人。
招收研究生:
每年招收博士研究生1名,硕士研究生3~4名(南京/无锡/苏州校区)。欢迎对智能机器人、计算机视觉、机器学习感兴趣的同学联系报考!
2004.9–2010.4, 东南大学, 控制理论与控制工程, 博士
2000.9–2004.6, 东南大学, 自动化, 学士
2010.4-2014.4, 东南大学, 自动化学院, 讲师
2014.5-至今, 东南大学, 自动化学院, 副教授
2021.10-2022.4,University of Liverpool, UK,访问学者
2022.4-2022.10,King's College London, UK,访问学者
学会会员:
IEEE member
中国自动化学会会员
中国人工智能学会智能机器人委员会委员
南京自动化及仪表协会理事
江苏省自动化学会机器人竞赛工作委员会委员
国际期刊审稿:
IEEE Transactions on Robotics
IEEE Transactions on Industrial Electronics
IEEE Transactions on Industrial Informatics
IEEE Transactions on Intelligent Transportation Systems
IEEE Transactions on Instrumentation & Measurement
IEEE Transactions on Human-Machine Systems
Neural Computing and Applications
Journal of Intelligent & Robotic Systems
Journal of Bionic Engineering
Sensors
Electronics
Advanced Robotics
IEEE Access
IEEE Sensors Journal
Applied Artificial Intelligence
国际会议审稿
IEEE ICRA, IEEE/RSJ IROS, ICARCV, IEEE RO-MAN
其它
2015 IEEE ICMA Session Chair, 2018 ICARCV Session Chair
[1]第7届全球智能控制与自动化大会(WCICA’08)最佳Poster论文奖,2008,排1;
[2]南京市第十届自然科学优秀学术论文三等奖,2013,排1;
[3]2013年度获校授课竞赛提名奖;
[4]2015年东南大学一等奖教金;
[5]2017年中国智能机器人大会优秀论文奖,排1;
[6]2017年中国自动化学会高等教育教学成果特等奖,排3;
[7]国家电网公司全球能源互联网研究院2019年科技进步二等奖;
[8]2021年首届全国教材建设奖,二等奖。
[9]2024年东南大学华为奖教金
[1]承担本科生《微机系统与接口技术》(自动化专业)、《感知与人机交互》(机器人工程/人工智能专业)的教学;
[2]承担研究生课《智能机器人》的教学;
[2]参与《微机系统与接口技术》国家精品共享资源课建设,2012;
[3]参与《自动化专业导论》国家视频公开课,2015;
[4]参编《高等学校教材:自动化学科概论》(高等教育出版社)第二版,2015;
[5]主持东南大学校级重点教改项目1项、校级教改项目1项;
[6]主持自动化学院教改项目2项。
指导本科生竞赛:
2025年Robocup中国赛一等奖、二等奖、三等奖各1项;
2024年Robocup中国赛三等奖1项、江苏省大学生机器人竞赛一等奖1项(识别组冠军)、三等奖1项;
2023年Robocup中国赛一等奖1项、江苏省大学生机器人竞赛一等奖1项(识别组冠军)、二等奖1项;
2022年Robocup中国赛一等奖1项(@home组全国亚军),江苏省大学生机器人竞赛一等奖1项(识别组冠军),二等奖1项;
2021年Robocup中国赛二等奖1项;
2021年中国大学生计算机设计大赛江苏省级赛特等奖1项;
2021年江苏省大学生机器人竞赛一等奖1项(识别组冠军),二等奖1项;
2020年Robocup中国赛三等奖1项;
2020年江苏省大学生机器人竞赛一等奖1项,二等奖1项;
2019年江苏省大学生机器人竞赛三等奖1项;
指导赵伟、段波伊、孙畅同学获得东南大学优秀本科毕设论文;
指导马家乐同学获得东南大学优秀硕士论文(专硕);
已累计指导研究生:
硕士生25人,博士生5人。
[1]机器人视觉、触觉感知
[2]机器人抓取与操作技能学习
[3]环境感知与SLAM
[4]计算机视觉及应用
Some examples and demos of our research:
(1)Learning-based Robot Grasping
Check out our paper for how a robot learns 6D grasp pose from RGB-D cameras (JINT paper) and Sim2Real transfer learning (RAS paper) and object pose estimation (TCDS paper).
(2) Learning-by-demonstration
Check out how a robot learns pick-and-place tasks from pose level (JINT paper), symbolic level (AR paper) and trajectory level (RAS paper).
Our paper on video captioning for imitating human demonstrations has been accepted by IEEE ICRA 2021, and TCDS.

(3)Tactile perception
We propose a novel tactile-motor policy learning method to generalize tactile-guided robot manipulation skills from simulation to reality (RAS paper) using the unsupervised adversarial domain adaptation of tactile images(TIM paper).
(4)Robot perception and SLAM
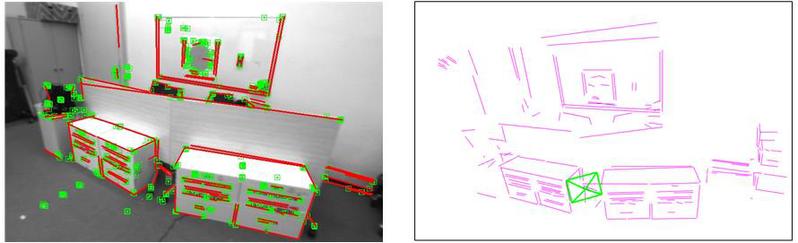
Check out our paper and code of Bag-of-Point-and-Line-Word Pairs for visual SLAM.
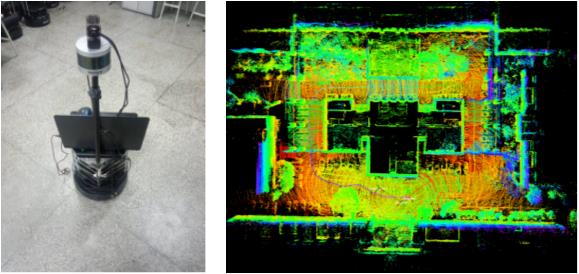
Lidar SLAM of mobile robots
(5)Computer Vision
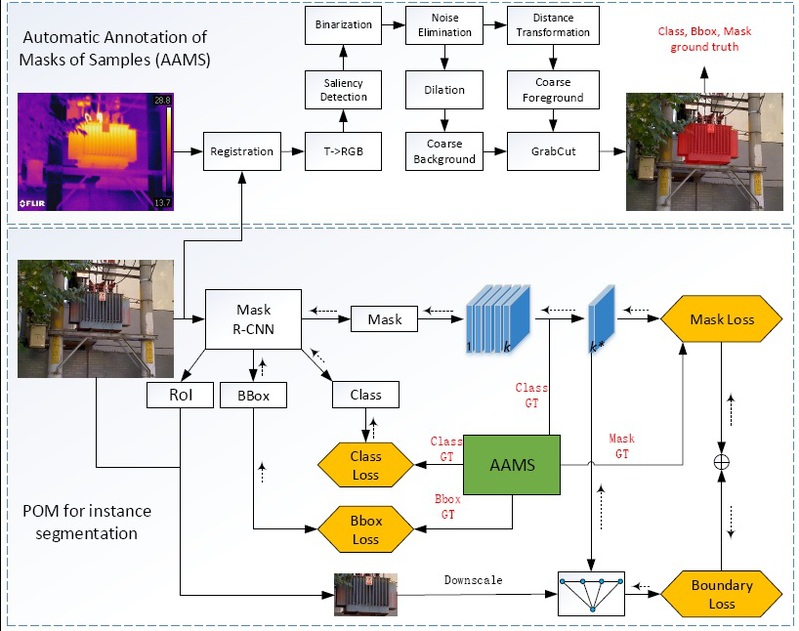
Check out our TIM paper for weakly-supervised image segmentation.
For more details, please check out our publications on [github] and [Researchgate].
1.国家自然科学基金面上项目,“欠明确表达任务下基于非受限交互的机器人模仿学习方法研究”,2016-2019,主持;
2.国家自然科学基金青年项目,“基于广义环境感知的服务机器人功能型定位导航方法研究”,2012-2014,主持;
3.江苏省自然科学基金面上项目,“机器人操作技能跨域迁移学习与泛化再现方法研究” 2020-2023,主持;
4.广东省自然科学基金面上项目,“视触觉引导的机器人弱刚度物体操作技能学习方法研究”2025-2027,主持;
5.之江实验室开放课题,“面向主动人机交互的协同运动与视听指称意图理解”,2022-2023,主持;
6.东南大学太湖创新基金,“基于具身视触觉感知的机器人技能Sim2Real迁移学习方法研究”,2025-2026,主持;
7.复杂工程系统测量与控制教育部重点实验室开放课题,“基于仿生视觉显著性检测的移动机器人级联环境地图创建方法研究”,2012-2014,主持;
8.东南大学基本科研业务费项目,“模仿人类示范行为的机器人抓取操作学习方法研究”,2020-2021,主持;
9.国家电网公司总部科技项目,“基于深度视觉的复杂动态作业环境智能重构与认知技术研究”子课题,2019-2021,主持;
10.国家电网公司总部科技项目,“增强现实智能穿戴设备基础软硬件平台技术研究及应用验证”子课题,2016-2018,主持;
11.国家电网公司总部科技项目,“多方跨环节电网工程数字化移交数据资源一致性修正与优化关键技术研究”子课题, 2023-2025,主持;
12.全球能源互联网研究院科技项目,“基于红外/紫外图像识别算法研究及软件模块辅助功能开发”,2019-2021, 主持;
13.全球能源互联网研究院科技项目,“基于红外/紫外图像识别分析软件模块研发及集成”,2020-2021, 主持;
14.全球能源互联网研究院科技项目,“云边端融合的数字孪生技术研究”,2022-2023, 主持;
15.国网智能电网研究院科技项目,“面向空间感知分析的厂站环境在线监测二三维实景映射工具及算法验证”,2023-2024,主持;
16.南瑞集团科技项目,“输电线路微拍图片预处理、三维图像可视化技术研究”,2024-2025,主持;
17.国网智能电网研究院科技项目,“基于语义理解的配网业务规则分析及校验”,2024-2025,主持;
18.国网江苏电力设计咨询有限公司科技项目,“建转运数字化移交三维数据表观一致性校验与修正技术研究”,2022-2023,主持;
19.上海鸣啸科技股份有限公司委托项目,“智能视频分析技术开发”,2022-2024,主持;
20.江苏省关键核心技术(装备)攻关项目子课题,“机器人打磨过程的智能检测与控制方法”,2021-2023,参与;
21.国家自然科学基金面上项目,“服务构件化的网络机器人系统理论与应用研究”,2011-2013,参与;
22.国家自然科学基金面上项目,“基于手绘语义地图的室内泛在感知网络下移动机器人视觉交互导航研究”,2012-2015,参与;
23.国家自然科学基金青年项目,“基于集理论的野外移动机器人地形环境建模和定位方法研究”,2011-2013,参与;
24.国家自然科学基金青年项目,“基于分布式感知的服务机器人和谐导航理论与方法研究”,2009-2011,参与;
25.国家863 高技术发展计划重点项目,“助老/助残机器人关键技术研究”,2007-2009,参与;
26.江苏省科技成果转化项目,“基于装配和搬运移动机器人的自动化车间(仓库)关键技术研发及产业化”,2014-2017,参与;
27.江苏省科技成果转化项目,“高速重载(500kg)工业机器人核心技术研发及产业化”,2016-2018,参与;
28.江苏省科技成果转化项目,“面向船舶工业的机器人曲面喷涂/预处理任务规划技术与功能软件研发” 2017-2020,参与;
29.江苏省自然科学基金重点项目,“既有公共建筑长期节能监测关键技术研究及示范”,2010-2013,参与;
Journal Paper
[48]Ling Tong, Kun Qian* and Xingshuo Jing, LBSNet: Lightweight Joint Boundary Detection and Semantic Segmentation for Transparent and Reflective Objects, IEEE Robotics and Automation Letters, vol. 10, no. 2, pp. 955-962, Feb. 2025 [Paper]
[47]Xingshuo Jing, Kun Qian*, Markus Vincze, CAGT: Sim-to-Real Depth Completion with Interactive Embedding Aggregation and Geometry Awareness for Transparent Objects, IEEE Transactions on Circuits and Systems for Video Technology, 2025[Paper]
[46]Boyi Duan, Kun Qian*, Aohua Liu, Shan Luo. Visual–tactile learning of robotic cable-in-duct installation skills, Automation in Construction, Volume 170, February 2025, 105905 [Paper]
[45]Kun Qian*, Zhaokun Yue, Jishen Bai, Hierarchical kernelized movement primitives for learning human-robot collaborative trajectories in referred object handover. Applied Intelligence, 55, 38, 2025 [Paper]
[44]Tong Shi, Kun Qian*, Yixi Fang, Yun Zhang, Hai Yu. Point-Line LIVO Using Patch-Based Gradient Optimization for Degenerate Scenes, in IEEE Robotics and Automation Letters, vol. 9, no. 11, pp. 9717-9724, 2024 [Paper]
[43]Xin Xu, Kun Qian*, Bo Zhou, Fang Fang, S2SNet: Two-stream Geometry-aware Sequence to Sequence Network for Robot Motion Skills Learning and Generalization, Advanced Engineering Informatics, Volume 62, Part B, October 2024, 102702 [Paper]
[42]Zhuoyang Zhang, Kun Qian*, Bo Zhou, Fang Fang, Xudong Ma, Gaze-assisted visual grounding via knowledge distillation for referred object grasping with under-specified object referring, Engineering Applications of Artificial Intelligence, Vol.133, Part E, July 2024, 108493, 2024 [Paper]
[41]Yixin Fang, Kun Qian*, Yun Zhang, Tong Shi, Hai Yu, Segmented Curved-Voxel Occupancy Descriptor for Dynamic-Aware LiDAR Odometry and Mapping, IEEE Transactions on Geoscience and Remote Sensing, vol. 62, pp. 1-16, 2024 [Paper]
[40]Yongqiang Zhao, Kun Qian*, Boyi Duan and Shan Luo, FOTS: A Fast Optical Tactile Simulator for Sim2Real Learning of Tactile-Motor Robot Manipulation Skills, IEEE Robotics and Automation Letters, vol. 9, no. 6, pp. 5647-5654, 2024[Paper]
[39]Xin Xu, Kun Qian*, Bo Zhou, Fang Fang, Xudong Ma, Imitating via manipulability: Geometry-aware combined DMP with via-point and speed adaptation, Computers & Electrical Engineering, Vol.117, 2024 [Paper]
[38]Kun Qian*, Zhuoyang Zhang, Wei Song, Jianfeng Liao. GVGNet: Gaze-Directed Visual Grounding for Learning Under-Specified Object Referring Intention, IEEE Robotics and Automation Letters, 2023, 8(9):1-8. [Paper]
[37]Xingshuo Jing, Kun Qian*, Tudor Jianu, Shan Luo. Unsupervised Adversarial Domain Adaptation for Sim-to-Real Transfer of Tactile Images, IEEE Transactions on Instrumentation and Measurement, 2023, PP(99):1-1 DOI: 10.1109/TIM.2023.3268458. [Paper]
[36]Kun Qian*, Yanhui Duan, Chaomin Luo, Yongqiang Zhao, Xingshuo Jing. Pixel-Level Domain Adaptation for Real-to-Sim Object Pose Estimation, IEEE Transactions on Cognitive and Developmental Systems, 2023, PP(99):1-1 DOI: 10.1109/TCDS.2023.3237502. [Paper]
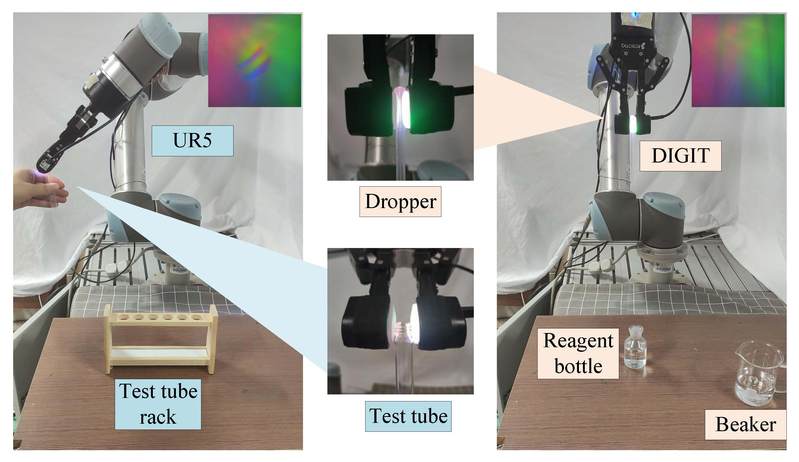
[35]Yongqiang Zhao, Xingshuo Jing, Kun Qian*, Daniel Fernandes Gomes, Shan Luo, Skill generalization of tubular object manipulation with tactile sensing and Sim2Real learning, Robotics and Autonomous Systems, 2022, 160(7815):104321 DOI: 10.1016/j.robot.2022.104321. [Paper]
[34]Xin Xu, Kun Qian*, Xingshuo Jing, Wei Song, Learning Robot Manipulation Skills from Human Demonstration Videos using Two-stream 2D/3D Residual Networks with Self-Attention. IEEE Transactions on Cognitive and Developmental Systems, 2022, DOI: 10.1109/TCDS.2022.3182877.[Paper]
[33]Yun Zhang, Rui Liu, Bo Zhou, Hai Yu, Kun Qian*. Visual Loop Closure Detection with Instance Segmentation and Image Inpainting in Dynamic Scenes using Wearable Camera, IEEE Sensors Journal, 2022, DOI: 10.1109/JSEN.2022.3190999.[Paper]
[32]Yinghui Liu, Kun Qian*, Xin Xu, Bo Zhou, Fang Fang, Grasp Pose Learning from Human Demonstration with Task Constraints. Journal of Intelligent & Robotic Systems, 2022, DOI:10.1007/s10846-022-01650-z.[Paper]
[31]Kun Qian*, Xin Xu, Huan Liu, Jishen Bai, Shan Luo, Environment-adaptive learning from demonstration for proactive assistance in human–robot collaborative tasks, Robotics and Autonomous Systems, 2022, DOI: 10.1016/j.robot.2022.104046. [Paper]
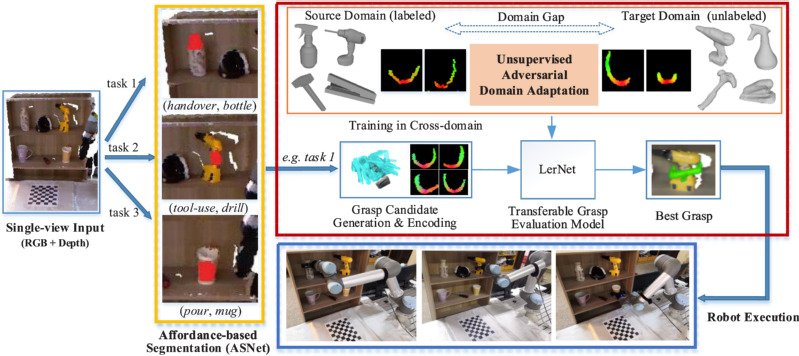
[30]Xingshuo Jing, Kun Qian*, Xin Xu, Jishen Bai, Bo Zhou, Domain adversarial transfer for cross-domain and task-constrained grasp pose detection, Robotics and Autonomous Systems. 2021, DOI: 10.1016/j.robot.2021.103872.[Paper]
[29]Bo Zhou, Yi He, Kun Qian, Xudong Ma, Xiaomao Li. S4-SLAM: A real-time 3D LIDAR SLAM system for ground/watersurface multi-scene outdoor applications. Autonomous Robots, 2021, 45(3), DOI: 10.1007/s10514-020-09948-3.
[28]Jiale Ma, Kun Qian*, Xiaobo Zhang, Xudong Ma. Weakly Supervised Instance Segmentation of Electrical Equipment Based on RGB-T Automatic Annotation, IEEE Transactions on Instrumentation and Measurement, v 69, n 12, p 9720-9731, December 2020, DOI:10.1109/TIM.2020.3001796. [Paper]
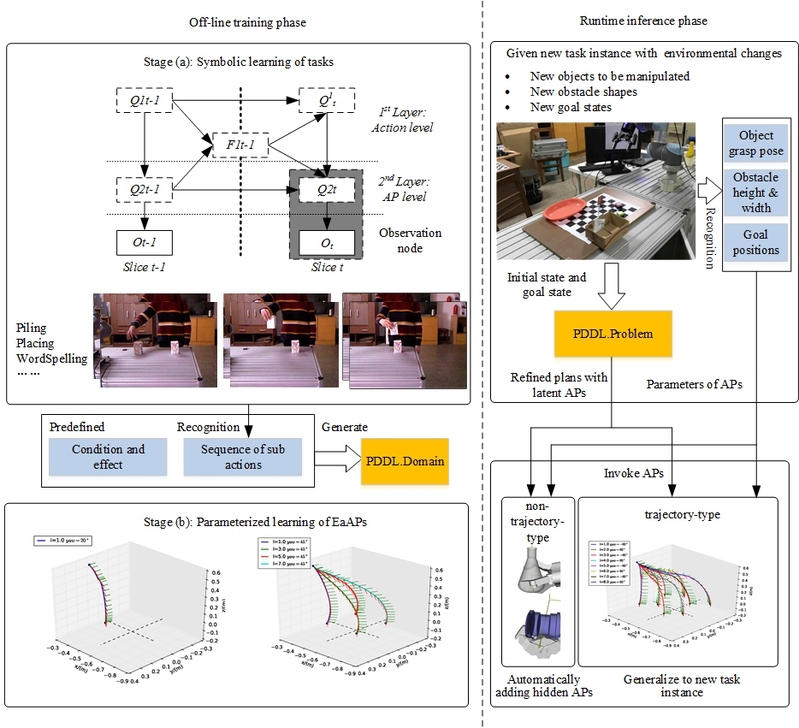
[27]Kun Qian*, Huan Liu, Jaime Valls Miro, Xingshuo Jing, Bo Zhou. Hierarchical and Parameterized Learning of Pick-and-Place Manipulation from Under-specified Human Demonstrations, Advanced Robotics, v 34, n 13, p 858-872, July 2, 2020, DOI:10.1080/01691864.2020.1778523. [Paper]
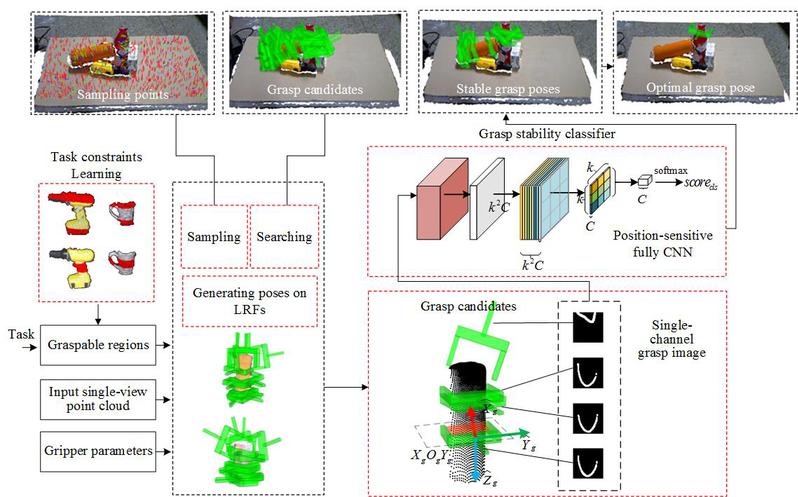
[26]Kun Qian*, Xingshuo Jing, Yanhui Duan, Bo Zhou, Fang Fang, Jing Xia, Xudong Ma. Grasp Pose Detection with Affordance-based Task Constraint Learning in Single-view Point Clouds, Journal of Intelligent & Robotic Systems, v 100, n 1, p 145-163, October 1, 2020, DOI: 10.1007/s10846-020-01202-3, 2020. [Paper] (表现不俗论文)
[25]Kun Qian*, Wei Zhao, Kai Li, Xudong Ma, Hai Yu. Visual SLAM with BoPLW Pairs using Egocentric Stereo Camera for Wearable-assisted Substation Inspection, IEEE Sensors Journal, 2020, 20(3):1630-1641. [Code], [Paper]
[24]Kun Qian*, Wei Zhao, Zhewen Ma, Jiale Ma, Xudong Ma, Hai Yu, Wearable-assisted localization and inspection guidance system using egocentric stereo cameras, IEEE Sensors Journal, 2018, 18(2):809-821. [Paper] (表现不俗论文)
[23]Kun Qian*, Xudong Ma, Xianzhong Dai, Fang Fang, Bo Zhou. Mobile robot self-localization in unstructured environments based on observation localizability estimation with low-cost laser range-finder and RGB-D sensors, International Journal of Advanced Robotic Systems, September-October:1-11, 2016.
[22]Kun Qian*, Xudong Ma, Xianzhong Dai, Fang Fang, Bo Zhou. Gaussian Process based IAQ Distribution Maping using an Interactive Service Robot. Journal of Ambient Intelligence and Smart Environments. 2016, 8: 359-373.
[21]Kun Qian*, Xudong Ma, Xianzhong Dai, Fang Fang, Bo Zhou. A utilization framework of ubiquitous resources for service robots using semantic matchmaking. International Journal of Advanced Robotic Systems, v 12, April 21, 2015.
[20]Kun Qian*, Xudong Ma, Xianzhong Dai and Fang Fang. Flexible Ambient Service Discovery and Composition for Component-based Robotic System. Journal of Ambient Intelligence and Smart Environments. 4(6), 2012, pp.547–562.
[19]Kun Qian*, Xudong Ma, Xianzhong Dai, Fang Fang. Improved Rao-Blackwellized particle filter for simultaneous robot localization and person-tracking with single mobile sensor. Journal of Control Theory and Applications, Vol. 9, No.4, 2011. 2011, 9(4):472-478.
[18]Kun Qian*, Xudong Ma, Xianzhong Dai, Fang Fang, Knowledge-enabled decision making for robotic system utilizing ambient service components, Journal of Ambient Intelligence and Smart Environments, 2014, 6(1):5-19. (表现不俗论文)
[17]Kun Qian*, Xudong Ma, Xianzhong Dai, Fang Fang, Bo Zhou. Decision-theoretic Navigation of Service Robots using POMDPs with Human-Robot Co-occurrence Prediction. International Journal of Advanced Robotic Systems, 2013, Vol. 10, 2013, pp.1-12.
[16]Kun Qian*, Xudong Ma, Xianzhong Dai and Fang Fang. Socially Acceptable Pre-collision Safety Strategies for Human-Compliant Navigation of Service Robots. Advanced Robotics, 24(13), 2010, 1813–1840.
[15]Kun Qian*, Xudong Ma, Xianzhong Dai, Fang Fang. Robotic Etiquette: Socially Acceptable Navigation of Service Robots with Human Motion Pattern Learning and Prediction. Journal of Bionic Engineering, 7(2), 2010, 150–160.
[14]Jie Niu, Kun Qian, Robust place recognition based on salient landmarks screening and convolutional neural network features,International Journal of Advanced Robotic Systems, v 17, n 6, 2020.
[13]Jie Niu, Xiongzhu Bo, Kun Qian, Exploiting contrast cues for salient region detection, Multimedia Tools and Applications, 2017, 76(8): 10427-10441.
[12]Bo Zhou, Kun Qian, Xudong Ma, Xianzhong Dai, Ellipsoidal bounding set-membership identification approach for robust fault diagnosis with application to mobile robots, Journal of Systems Engineering and Electronics, 2017, 28(5):986-995.
[11]Changhai Peng, Kun Qian, Design and application of a VOC-monitoring system based on a ZigBee wireless sensor network. IEEE Sensors Journal, 2015, 15(4): 2255-2268.
[10]Changhai Peng, Kun Qian, Development and application of a ZigBee-based building energy monitoring and control system, the Scientific World Journal, Volume 2014, DOI: 10.1155/2014/528410).
[9]Bo Zhou, Kun Qian, Xudong Ma, Xianzhong Dai. A set-theoretic algorithm for real-time terrain mapping of mobile robots in outdoor environments. International Journal of Advanced Robotic Systems, 2013, 10: 1-14.
[8]Chunhua Hu, Xudong Ma, Xianzhong Dai and Kun Qian, Reliable people tracking approach for mobile robot in indoor environments, Robotics and Computer-Integrated Manufacturing, 26(2): 174–179, 2010.
[7]刘环, 钱堃*, 桂博兴, 马旭东, 基于多演示动作基元参数化学习的机器人任务泛化,机器人, 2019, 41(5):574-582.
[6]夏晶, 钱堃*, 马旭东, 刘环, 基于级联卷积神经网络的机器人平面抓取位姿快速检测, 机器人, 2018,40(6): 794-802.
[5]孙自飞, 钱堃*, 马旭东, 戴先中, 动态环境中基于多传感器观测可定位性估计的移动机器人自定位方法, 智能系统学报, 2017.4.7, (4):1~7.10.13973/j.cnki.robot.170702
[4]钱堃*, 马旭东, 戴先中, 房芳. 基于层次化SLAM的未知环境级联地图模型创建方法, 机器人, 2011, 33 (6): 736-741.
[3]钱堃*, 马旭东, 戴先中, 房芳. 预测行人运动的服务机器人POMDP导航. 机器人. 2010, 31(1), 18-24.
[2]钱堃* 马旭东, 戴先中. 基于抽象隐马尔可夫模型的运动行为识别方法. 模式识别与人工智能. 2009, 22(3): 433-439.
[1]钱堃*, 马旭东, 戴先中, 房芳. 同时机器人定位与人体跟踪的多源感知协作粒子滤波方法. 机器人, 2008, 30(6): 491-497.
Conference Paper (Selected)
[19]Xingshuo Jing, Yongqiang Zhao, Jiaqi Jiang, Boyi Duan, Kun Qian*, Shan Luo, Unsupervised Adversarial Domain Adaptation for Sim-to-Real Transfer of Tactile Manipulation Skills, 2023 IEEE International Conference on Robotics and Automation (ICRA), ViTac Workshop.
[18]Xin Xu, Kun Qian*, Bo Zhou, Shenghao Chen, Yitong Li, Two-Stream 2D/3D Residual Networks for Learning Robot Manipulations from Human Demonstration Videos, IEEE ICRA 2021, pp. 3353 – 3358.
[17]Kai Li, Kun Qian*, et al. Regional Semantic Learning and Mapping Based on Convolutional Neural Network and Conditional Random Field, 2020 IEEE International Conference on Real-time Computing and Robotics (RCAR), 2020, pp.14-19. (Best Paper Finalist)
[16]Boxing Gui, Kun Qian*, et al. Knowledge Induced Deep Q-Network for Robot Push and Grasp Manipulation Skills Learning, CAC, 2020.
[15]Xiaobo Zhang, Kun Qian*, et al. Fire Detection based on Convolutional Neural Networks with Channel Attention, CAC, 2020.
[14]Zhewen Ma, Kun Qian*, Wei Zhao, Xudong Ma, Hai Yu, Multi-session mapping for indoor substation environment using a head-mounted RGB-D sensor, 3rd IEEE International Conference on Energy Internet, ICEI 2019, pp.1-6, 2019.
[13]Wei Zhao, Kun Qian*, Zhewen Ma, Xudong Ma, Stereo Visual SLAM Using Bag of Point and Line Word Pairs, Proceedings of 12th International Conference on Intelligent Robotics and Applications, ICIRA 2019, pp.651-661, 2019.
[12]Kun Qian*, Xiaobo Zhang, Hai Yu, Xudong Ma, Industrial Maintenance and Assembly Guidance Using a Markerless AR System with Monocular Camera, 2018 15th International Conference on Control, Automation, Robotics and Vision, ICARCV 2018, p 1911-1916.
[11]Kun Qian*, Jun Xu, Ge Gao, Fang Fang, Xudong Ma, Learning Under-Specified Object Manipulations from Human Demonstrations. 2018 15th International Conference on Control, Automation, Robotics and Vision, ICARCV 2018, p 1936-1941.Paper
[10]Jiale Ma, Kun Qian*, Xudong Ma, Wei Zhao, Reliable Loop Closure Detection Using 2-channel Convolutional Neural Networks for Visual SLAM. the 37th Chinese Control Conference, 2018.
[9]Jun Xu, Kun Qian*, Huan Liu, Xudong Ma, Hand pose estimation for robot programming by demonstration in object manipulation tasks, Chinese Control Conference, CCC, v 2018-July, p 5328-5333, October 5, 2018.
[8]Ge Gao, Kun Qian*, Xudong Ma, Jing Xia, Hai Yu. Object Recognition and Augmentation for Wearable-Assistive System Using Egocentric RGB-D Sensor, 2017 IEEE 7th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems, CYBER 2017, p 775-780.
[7]Kun Qian*, Dan Niu, Xudong Ma, Fang Fang. Learning spatial constraints using Gaussian process for shared control of semi-autonomous mobile robots. Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics, v 2, p 201-208, 2017.
[6]Kun Qian*, Ge Gao, Fang, Fang, Liangjun Zhang, RGB-D based daily activity recognition for service robots using clustering with Gaussian Mixtures and FastDTW, 2016 International Conference on Advanced Robotics and Mechatronics, p 651-656, October 21, 2016.
[5]Kun Qian*, Zhijie Chen, Xudong Ma, Bo Zhou, Mobile Robot Navigation in Unknown Corridors using Line and Dense Features of Point Clouds, in Proc. of 41st Annual Conference of the IEEE Industrial Electronics Society (IEEE IECON 2015), Yokohama, Japan, 1831-1836.
[4]Kun Qian*, Xudong Ma, Fang Fang, Hong Yan. 3D Environmental Mapping of Mobile Robot Using a Low-cost Depth Camera, the 2013 IEEE International Conference on Mechatronics and Automation, Takamatsu, Kagawa, Japan, August 4-7, 2013, pp.507-512
[3]Kun Qian*, Xudong Ma, Xianzhong Dai, Fang Fang. Semantic Service Composition Mechanism for Component-based Robotic System. In Pro. of the 37th Annual Conference of the IEEE Industrial Electronics Society (IECON 2011), Melbourne, Australia, Nov.7-10, 2011, pp:3311-3316.
[2]Kun Qian*, Xudong Ma, Xianzhong Dai and Chunhua Hu. A Multi-camera Approach to Tracking and Localization of People with Coexisting Robots. The 7th World Congress on Intelligent Control and Automation(WCICA’ 08), Chongqing, China, June 2008, 5162-5167. (Best Poster Paper Award)
[1]Kun Qian*, Xudong Ma, Xianzhong Dai. Simultaneous Robot Localization and Person Tracking Using Rao-Blackwellised Particle Filters With Multi-modal Sensors. 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’08), Nice, France, Sept. 2008, pp.3452-3457.
以上*号为通讯作者
专利:
已授权发明专利:
1.构件化机器人系统的服务模型与网络辅助资源利用方法,201310210880.0,排1
2.基于高斯过程模型的建筑物环境传感器测点优化方法,201410223460.0,排1
3.基于显著场景点检测的移动机器人级联地图创建方法,201310183577.6, 排1
4.面向可靠WIFI连接的移动机器人自主巡航方法, 201510945537.X, 排1
5.一种基于实时力控的装配机器人全空间柔顺插孔控制方法, 201610857074.6,排1
6.一种基于空间词袋模型的移动机器人三维建图与避障方法,201610170481.X, 排1
7.一种基于RGB-T融合的电网设备图像弱监督实例分割方, 201910156558.1,排1
8.一种基于基于逐步对抗学习的半监督图像实例分割方法, 201910168475.4,排2
9.室外作业环境下基于双目摄像机的可穿戴式定位与路径引导方法, 201710053731.6,排1
10.一种用于设备检修的穿戴式辅助装置及设备检修可视化指导方法, 201710050139.0,排1
11.一种单视角点云下基于域迁移的机器人抓取位姿检测方法,2020114188115,排1
12.动态场景下基于语义分割与图像修复的视觉回环检测方法,202010447355.0,排1
已受理发明专利申请:
1.一种基于级联卷积神经网络的机器人非规则物体抓取位姿快速检测方法,201810268775.5,排1
2.一种单视角点云下基于实例分割的机器人空间抓取位姿检测方法,201910368494.1,排1
3.变电作业场景的标识模型训练方法、标识方法及装置,202010518643.0,排3
4.一种基于域迁移和深度补全的物体姿态估计方法 202110592716.5,排2
5.一种含领域自适应的机器人乱序目标推抓方法,2022105811854,排1
联系我们:
江苏省南京市四牌楼2号中心楼 东南大学自动化学院
电话:025-83792724
邮箱:jupiter@seu.edu.cn

