

柴琳,1978年9月生,江苏南京人,博士,东南大学自动化学院教授(自动化学院2000年以来首位女教授),博士生导师,美国德克萨斯大学圣安东尼奥分校访问学者。中国自动化学会会员、青工委委员,中国人工智能学会自然计算专委会委员,中国系统工程学会会员,江苏省自动化学会会员,江苏省信息技术应用学会具身智能专业委员会委员。主持国家自然科学基金、省自然科学基金等4项科研项目,作为主要成员参加多项国家自然科学基金以及省部级科研项目的研究工作,发表论文80余篇,其中被SCI收录30余篇,EI收录50余篇。2017年入选“六大人才高峰”高层次人才培养对象,2020年入选江苏省、盐城市“科技副总”人才培养对象。美国《数学评论》(Mathematical Reviews)评论员。
研究方向包括机器学习(图像处理中的目标识别与跟踪、CT图像组学研究、智能制造中的工业检测、工艺流程强化学习研究等),非线性系统控制理论(PTZ控制、光电跟踪控制、无人机控制等)。
每年招生:电子信息专业(自动化、仪科、电气、信息、电子等均可)、数学等背景的硕士研究生3-5名,博士1-2名,非诚勿扰。
吾心自有光明月,千古团圆永无缺。
真正的知行合一,是不计较回报的付出,但要坚信总有人在适当的时候看到你的光芒,宛如天文望远镜看到的历史星“控”。
本团队以国家人工智能引领下的高质量发展为需求,将智能制造、公共医疗、能源监控等领域的具体工程实践中亟需解决的问题与多源信息融合技术下的智能感知与控制进行了理论与实践的高度融合,真正做到了“科研从实践中来、到实践中去”,而非以片面追求高被引、帽子为目标,是一个有情怀、有温度的团队,欢迎致力于国家高端控制与人工智能理论研究及自动化事业发展的高级人才的加入。
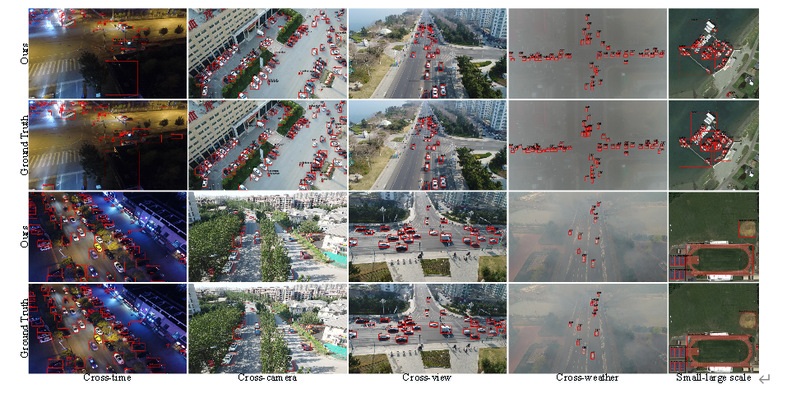
本团队部分科研成果应用场景展示如下:
既有医工交叉结合项目研发(如下与杭州某医院合作的世界上第一套“乳腺癌放射性皮炎预测系统”):
你以为就这些?那些满天飞的多智能体控制理论我们也会,只不过能用在真实的场景中(涂布检测闭环控制、智能电网功率预测),能用在实践中的公式才是好公式!
想知道实验室其它更加精彩纷呈的成果,打开电脑来封邮件吧,绝对不会让你失望!
2004/03-2007/01,东南大学,自动化学院,博士
2002/09-2004/01,东南大学,自动化学院,硕士并提前攻博
1997/09-2001/06, 东南大学,自动控制系,学士
2017/04-至今,东南大学,自动化学院,教授
2012/03-2013/03 美国德克萨斯大学圣安东尼奥分校,计算机与电子工程系,访问学者
2011/04-2017/03,东南大学,自动化学院,副研究员
2009/03-2011/03,东南大学,自动化学院,讲师
2007/04-2009/03,东南大学,《电气工程》,博士后
2001/07-2002/06,江苏江计电脑公司,工程师
中国自动化学会会员、青工委委员,中国人工智能学会自然计算专委会委员,中国系统工程学会会员,江苏省自动化学会会员,江苏省信息技术应用学会具身智能专委会委员。主持国家自然科学基金、省自然科学基金等4项科研项目。国家自然科学基金、浙江省自然基金函评专家,2017年入选“六大人才高峰”高层次人才培养对象,2020年入选江苏省、盐城市“科技副总”人才培养对象。美国《数学评论》(Mathematical Reviews)评论员。
每年招收博士生一名,硕士生2-3名,欢迎本科为电子信息类专业的优秀学生报考。
研究方向包括机器学习(图像处理中的目标识别与跟踪、CT图像组学研究、智能制造中的工业检测、工艺流程强化学习研究等),非线性系统控制理论(PTZ控制、光电跟踪控制、无人机控制等)。
与飞行控制、非线性控制相关的科研项目:
1. 国家自然科学基金面上项目,61374038,基于压制法的非线性时滞系统的镇定控制与自适应控制研究,2014/01-2017/12,已结题,主持
2. 国家自然科学基金青年项目,60804017,复杂时滞系统的自适应控制与H无穷控制,2009/01-2011/12,已结题,主持
3. 江苏省自然科学基金面上项目,BK2011253,复杂分布与中立时滞系统的自适应控制研究,2012/01-2014/12,已结题,主持
4.江苏省“六大人才高峰”高层次人才计划,RJFW-001,风场作用下视觉伺服系统的无人机飞行控制研究,2018/01-2019/12,在研,主持
5.国家自然科学基金委员会, 面上项目, 62373102, 非线性多智能体系统分布式最优一致性研究, 2024-
01-01 至 2027-12-31, 50万元, 在研, 参与
6.国家自然科学基金面上项目,61973075,Semi-Markovian切换系统的动态滑模控制及逗留时间和模式依赖滑模控制器研究,2020/01-2023/12,在研,排名第二
7.国家自然科学基金面上项目,61473079,动态时延网络的镇定控制与自适应控制研究,2014/01-2017/12,已结题,排名第二
8.国家自然科学基金面上项目,61374050,潜艇燃料电池混合电源系统的自寻优协调控制研究,2014/01-2017/12,已结题,排名第三
9.国家自然科学基金面上项目,61174076,基于抗饱和技术的不确定广义时滞系统的分析与综合,2012/01-2015/12,已结题,排名第三
10.教育部博士点基金,20110092110021,分布与中立时滞系统关于时滞参数的自适应控制研究,2012/01-2014/12,已结题,排名第二
与视觉定位、智能控制相关的科研项目:
1.上川精密科技有限公司,涂布模头智能闭环控制与调试算法开发, 2024-12 至 2025-12, 在研, 主持
2.桐庐精锐医疗器械有限公司, CT影像组学辅助诊断仪, 2023-12 至 2024-11, 结题, 主持
3.**科技有限公司,火车焦炭智能装载系统开发,2025-01 至 2025-6,在研,主持
4.南京华视智能科技有限公司, 涂布质量检测与闭环控制研究, 2023-04 至 2025-07, 一期结题、已开始二期研究工作, 主持
4.北京***有限公司,成立东大-东平人工智能前瞻技术联合研发中心,2021/01-2023/12,在研,排名第二;
5.***上海工程技术有限公司,从事工业重废等废钢智能感知判级模型研究,2021/01-2022/12,结题,排名第二;
6. 江苏省海事局项目,小型无人机在海事监管中的应用研究,2018/05-2018/12,结题,排名第二;
7. 上海市级项目,H202010321,上海泗泾古镇智慧杆智能监控服务系统,2020/07-2020/12,结题,排名第二;
8. 苏州市轨道交通集团项目,H201910551,苏州地铁车站溶液除湿空调与湿度独立控制系统研究,2019/10-2021/12,结题,排名第二;
9. 国家电网项目,H201910374,城市智慧能源体系典型设计与运行服务研究,2019/07- 2021/12,结题,排名第三。
无人机飞行控制与非线性控制理论研究方面:
[1] 柴琳, 王攀, 费树岷. Global state control for a class of inherently higher-order parameterized nonlinear time-delay systems based on homogeneous domination approach. International Journal of Robust and Nonlinear Control, 2019, 29(3):829-848. (SCI收录)
[2] 柴琳, 钱春江. Global stabilisation for a class of uncertain nonlinear time-delay systems by dynamic state and output feedback, International Journal of Control, 2015, 88(6): 163-1173. (SCI收录)
[3] 柴琳. Global Stabilization for a Class of Nonlinearly Parameterized Time-Delay Systems with Output Feedback Dynamic Linear Controllers. IMA Journal of Mathematical Control and Information, 2015, 32(2):427-445. (SCI收录)
[4] 柴琳. Global Output Control for a Class of Inherently Higher-order Nonlinear Time-delay Systems Based on Homogeneous Domination Approach. Discrete Dynamics in Nature and Society, vol. 2013, Article ID 180717, 6 pages, 2013. doi:10.1155/2013/180717. (SCI收录)
[5] 柴琳, 钱春江.Global Stabilization via Homogeneous Output Feedback for a Class of Uncertain Nonlinear Systems subject to Time-Delay. Transactions of the Institute of Measurement and Control, 2014, 36(4):478-486. (SCI收录)
[6] 柴琳, 钱春江. State Feedback Stabilization for a Class of Nonlinear Time-Delay Systems via Dynamic Linear Controllers. Journal of Systems Science and Complexity, 2014, 27(3): 453-462. (SCI收录)
[7] 柴琳, 费树岷. Memory State Feedback Stabilization for a Class of Time-delay Systems with a Type of Adaptive Strategy. Journal of Applied Mathematics, 2013, Article ID 319415, 8 pages, 2013. doi:10.1155/2013/319415. (SCI收录)
[8] 柴琳, 费树岷, Jin Haiyan, Wang Ruimin, Li Yanhong. New type of adaptive control for a class of distributed time-delay systems with adaptation regard to delay parameter. Journal of Systems Engineering and Electronics, 2010, 21(6): 1054-1062. (SCI收录)
[9] 柴琳, Cheng Ming, 费树岷, Zhai Junyong. Adaptive control for a class of discrete-time time-delay systems with regard to delay parameter. Journal of Systems Engineering and Electronics, 2009, 20(1): 159-167. (SCI收录)
[10] 柴琳,王攀,费树岷. Control Researches on Nonlinear Systems for A Quadrotor UAV Helicopter under Impact of Wind Disturbance Based on Method of Domination. 14th International Conference on Computer Science and Education, ICCSE 2019, Doranto, Canada, 2019, August 18-23:1080-1085. (EI收录)
[11] 柴琳,王攀,费树岷.Global stabilization for a class of uncertain nonlinear time-delay systems by linear sampled-data output feedback[C]. Proceedings - 2018 33rd Youth Academic Annual Conference of Chinese Association of Automation, YAC 2018, Nanjing, Jiangsu, China, 2018, July 6-8, 677-682. (EI收录)
[12] 柴琳. Global Stabilization for a Class of Nonlinear Time-Delay Systems Using Linear Output Feedback. 东南大学学报(英文版), 2013, 29(3): 264-269. (EI收录)
[13] 王瑶, 柴琳, 金立左. 风场扰动下四旋翼无人机的建模和控制研究,2017年中国自动化学会华东六省一市学术年会暨江苏省自动化学会年会,2017.9.23-2017.9.25:77-87. (EI收录)
[14] 赵雅涵, 柴琳, 金立左. 带前馈补偿的PID-DMC算法在PTZ平台的应用, 工业控制计算机, 2018, 31(08): 49-51,54.
[15] 赵雅涵, 柴琳. 风场干扰下四旋翼无人机的控制器设计, 江苏省自动化学术年会, 2018, 江苏,扬州,11月19-21日: 1-6.
[16] 柴琳, 王攀, 费树岷. Global State Control for a Class of Inherently Higher-Order Parameterized Nonlinear Time-Delay Systems Based on Homogeneous Domination Approach. 12th IFAC Workshop on Time Delay Systems, University of Michigan, Ann Arbor, MI, USA, 2015, June 28-30, IFAC-PapersOnLine, 48(12): 191-196. (EI收录)
[17] 王攀, 柴琳,陈志强, 费树岷. Global sampled-data output feedback stabilization for nonlinear systems with unknown measurement sensitivity, International Journal of Robust and Nonlinear Control,2019, 29(14): 4909-4927.
[18] 王攀, 柴琳,费树岷, 孟庆华. 一类非线性状态时滞系统的基于采样控制器的渐近稳定问题, 控制与决策, 2020, 35(5): 1143-1150. (EI刊源)
[19] 王攀, 柴琳, 费树岷. Semi-Global Stabilization via Homogeneous Output Feedback for a Class of Nonlinear Time-Delay Systems. Journal of Systems Science and Complexity, 2016, 29(6): 1538-1552. (SCI收录)
[20] 王攀, 柴琳, 费树岷.Semi-Global Stabilization for a Class of Nonlinear Time-Delay Systems by Linear Output Feedback. 12th IFAC Workshop on Time Delay Systems, University of Michigan, Ann Arbor, MI, USA, 2015, June 28-30, IFAC-PapersOnLine,48(12): 185-190. (EI收录)
[21] 王攀, 柴琳,费树岷. Global Stabilization for Second-Order Nonlinear Systems via Sampled-Data Bounded Controller. The International Conference on Robotics and Automation Sciences (ICRAS), Hong Kong, China, 2017, Aug. 26-28: 83-87.
[22] 王攀, 柴琳, 费树岷. Global Output Feedback Stabilization for a Class of Nonlinear Time-Delay Systems via Linear Sampled-Data Control. 31st Youth Academic Annual Conference of Chinese Association of Automation, Wuhan, China, 2016, Nov.11-13: 303-308. (EI收录)
[23] 樊鹏鹏, 柴琳, 金立左. 基于目标运动补偿的自抗扰轨迹跟踪控制. 工业控制计算机, 2017, 30(7): 48-49.
[24] 袁婕, 费树岷, 柴琳等. Critical actuator rate limit effect on control performance in first-order plus time-delay systems,2022, CCC2022, Hefei, China, July27-29:163-169.(EI刊源)
[25] 袁婕, 费树岷, 柴琳. Compensation strategies based on Bode step concept for actuator rate limit effect on first-order plus time-delay systems. Nonlinear Dynamics, 2020, 99:2851–2866. (SCI收录)
[26] 袁婕, 费树岷等. Hybrid model-based feedforward and fractional-order feedback control design for the benchmark refrigeration system. Industrial & Engineering Chemistry Research, 2019, 58(38):17885–17897. (SCI收录)
[27] 袁婕, 柴琳, 费树岷等. First-order plus time-delay systems under the effects of actuator rate limit. IET Control Theory and Applications, 2020, 14(17): 2481-2490. (SCI收录)
[28] 鲍乐平, 柴琳, 费树岷. Control synthesis of linear distributed parameter switched systems. Journal of Systems Engineering and Electronics, 2015, 26(3): 565-572. (SCI收录)
[29] 鲍乐平, 柴琳, 费树岷. H-infinity Control of Switched Linear Parabolic Systems. Electronic Journal of Differential Equations, 2014, Volume 2014, (131): 1-10. (SCI收录)
[30] 田小敏, 柴琳. Robust control for fractional order complex nonlinear systems via second-order sliding mode controller. Journal of Computational Information Systems, 2014, 10(10): 4101-4108. (EI收录)
[31] 田小敏, 费树岷, 柴琳. Finite-time synchronization of fractional-order chaotic systems by considering dead-zone phenomenon. Control Theory and Applications, 2015, 32(9):1240-1245. (EI收录)
[32] 田小敏, 费树岷, 柴琳. On modified second-order sliding mode synchronization of two different fractional order Hyperchaotic systems. International Journal of Multimedia and Ubiquitous Engineering, 2015, 10(4): 387-398.(EI收录)
[33] 田小敏, 费树岷, 柴琳. Robust stabilization of a class of uncertain fractional-order chaotic systems via a novel sliding mode control scheme. International Journal of Hybrid Information Technology, 2014, 7(6): 245-258.(EI收录)
[34] 田小敏, 费树岷, 柴琳. Finite-time stabilization of fractional-order systems with model uncertainties and external disturbances. 26th Chinese Control and Decision Conference(CCDC 2014), Changsha, China, 2014, May 31-June 2:703-707.(EI收录)
[35] 田小敏, 费树岷, 柴琳. Adaptive control of a class of fractional-order nonlinear complex systems with dead-zone nonlinear inputs. Proceedings of the 33rd Chinese Control Conference(CCC 2014), Hangzhou, China, 2014, July 28-30: 1899-1904.(EI收录)
[36]柴琳, 费树岷, 冯悠扬. Stabilization control for a class of complicated distributed time-delay systems with adaptation regard to delay parameter. Proceeding of the 11th World Congress on Intelligent Control and Automation, WCICA 2014, Shenyang, China, 2014, June 29-July 4, I: 6194-6199. (EI收录)
[37]柴琳, 费树岷, 翟军勇, 金海燕, 王瑞敏, 李延红. 网络环境下混合时滞系统对时滞参数的自适应控制.东南大学学报(自然科学版). 2010, 40, sup(1): 20-24. (EI收录)
[38] 柴琳, 程明, 费树岷, 翟军勇.一类含分布与离散时滞的线性时滞控制系统的H∞控制,控制与决策, 2009, 24(1): 101-106. (EI收录)
[39] 柴琳, 费树岷,一类输入时滞的不确定多时滞非线性系统的自适应H无穷控制, 系统科学与数学, 2007, 27(6): 880-891.
[40] 柴琳, 费树岷, 辛云冰.一种输入时滞的线性时滞系统的新型自适应控制,系统科学与数学, 2008, 28(12): 1535–1544.
[41] 柴琳, 程明, 费树岷, 翟军勇, 黄静妍.一类混合时滞系统对时滞参数的自适应控制,东南大学学报(自然科学版), 2008, 38, Sup(II): 90-95. (EI收录)
[42] 柴琳, 费树岷, 辛云冰.一类带未知输入时滞的多时滞非线性系统的对时滞参数的自适应H无穷控制,自动化学报,2006,32(2):237-245. (EI收录)
[43] 柴琳, 费树岷. 一类改进的输入时滞的线性时滞系统的H无穷控制, 控制理论与应用, 2006, 23(5): 800-804. (EI收录)
[44] 柴琳, 费树岷. 一类输入时滞的线性时滞系统的自适应H无穷控制, 系统工程理论与实践, 2006,26(3): 61-67. (EI收录)
[45] 柴琳, 费树岷, 辛云冰. 线性时滞系统的新型自适应控制的研究,南京理工大学学报(自然科学版), 2005, A5: 50-54. (EI收录)
[46] 柴琳, 费树岷, 罗骏.一类输入时滞的线性时滞系统的基于观测器的对时滞参数的自适应控制,第24届中国控制会议论文集, 2005: 775-781. (ISTP收录)
[47] 柴琳, 费树岷. An Improved Approach of Adaptive Control for Time-Delay Systems Based on Observer. International Symposium on Neural Networks 2007, Springer Lecture Notes Computer Science, I: 222-230. (EI收录)
[1] 马游, 柴琳等. Hierarchical alignment network for domain adaptive object detection in aerial images. ISPRS Journal of Photogrammetry and Remote Sensing, 2024, 208: 39-52. (中科院、JCR 1区) https://doi.org/10.1016/j.isprsjprs.2024.01.005.
[2] 马游, 柴琳等. Exploring Relational Knowledge for Source-free Domain Adaptation. IEEE Transactions on Circuits and Systems for Video Technology, 2024, in press. https://doi.org/10.1109/TCSVT.2024.3484761.(中科院、JCR 1区)
[3] 马游, 柴琳,金立左. Scale Decoupled Pyramid for Object Detection in Aerial Images, IEEE Transactions on Geoscience and Remote Sensing, 2023, 61:1-14. https://doi.org/10.1109/TGRS.2023.3298852 (SCI刊源)(JCR 1区)
[4] 马游, 柴琳,金立左等. AVS-YOLO: Object Detection in Aerial Visual Scene, International Journal of Pattern Recognition and Artificial Intelligence, 2022, 36(2): 2250041 (SCI收录)
[5] 张雨成, 柴琳, 马游等. MKDFusion: Modality knowledge decoupled for infrared and visible image fusion, Applied Intelligence, accepted.
[6] 周虎, 柴琳,金立左. Research on Infrared Large Field of View Mosaic Based on Improved ORB Algorithm, Moving Integrated Product Development to Service Clouds in the Global Economy - Proceedings of the 21st ISPE Inc. International Conference on Concurrent Engineering2022, 22: 3-13. (EI收录)会议最佳论文奖
[7] 张雨成, 柴琳,雷子力等. Research on Sign Language Recognition Based on Attention Mechanism. The conference at which the Contributor proposes to present the Content, titled: Jiangsu Annual Conference on Automation JACA 2024, Nanjing, Jiangsu Province, China, 2024, Nov. 22-25: in press. (EI收录)
[8] 陈沈玮, 柴琳.Detection of Surreptitious Photography Based on Object Detection, Jiangsu Annual Conference on Automation (JACA 2023), 2023(38): 111-118. (EI收录)
[9] 周泽昊, 柴琳, 金立左. Few-shot and Fast Texture Segmentation Based on Non-padding Convolution, Chinese Control Conference, CCC, Hefei, China, 2022, July 25-27: 6701-6708. (EI收录)
[10] 史恭标,柴琳,金立左. A New Image Denoising Method Based on Steer Kernel Regression, Jiangsu Annual Conference on Automation (JACA 2020), Xuzhou, China, 2021, Nov. 13-15: 9 – 15. (EI收录)
[11] 李欢, 柴琳, 金立左. 航拍视角下的实时车辆检测算法研究与实现, 第三十九届中国控制会议, CCC2020, 中国, 沈阳, 2020, 7月27日-29日: 8037-8043. (EI收录)
[12] 张胜利,柴琳,金立左. Vehicle Detection in UAV Aerial Images Based on Improved YOLOv3, 17th IEEE International Conference on Networking, Sensing and Control (IEEE ICNSC 2020), Nanjing, China, 2020, Oct.30- Nov.2: 1-6. (EI收录)
[13] 高卓越,柴琳,金立左. Location recognition based on local feature matching. Automatic Target Recognition and Navigation (MIPPR 2019), Wuhan, China, 2019, Nov.2-3, 11429: Q1-Q9. (EI收录)
[14] 宋亮亮, 柴琳,金立左. 基于无标签数据的安防检测系统算法设计, 2019年江苏省自动化学术年会(JACA2019), 中国, 徐州, 2019, 6月8日-10日: 1-7.
[15] 季宇龙, 柴琳.基于YOLOv8的航拍小目标检测算法研究, Jiangsu Annual Conference on Automation (JACA 2023), accepted.
[16] 周富杰, 柴琳.基于立体校正和改进SIFT算法的双目图像拼接方法, Jiangsu Annual Conference on Automation (JACA 2023), accepted.
[17] 郁亚峰, 金立左, 柴琳.基于深度卷积网络的地面车辆检测, 第九届中国信息融合大会,中国,太原, 2019, 9月24日-25日: 665-671.
[18] 陈炜耿,柴琳,赵雅涵. 一类改进的红外无损检测技术热波图像序列处理方法,机械设计与制造工程,2018, 47(12): 101-106.
[19] 董伟, 金立左, 柴琳.基于深度学习的钢筋数量识别, 第九届中国信息融合大会,中国,太原, 2019, 9月24日-25日: 482-489.
运动目标检测识别方面:
[1] 孙权林, 柴琳,金立左. Online Geometry Feature Tracker by Adaptive Cascade, 2023 4th International Symposium on Computer Engineering and Intelligent Communications, ISCEIC 2023, Nanjing, China, 2023, Aug. 18-20: 640-647. (EI收录)
[2] 刘苏明, 柴琳,金立左. Panoramic Image Stabilization Algorithm Base on Distance Transformation and Image Pyramid, Advances in Transdisciplinary Engineering, 2022, 22: 369-378. (EI收录)
[3] 赵颖, 金立左, 柴琳.基于深度学习的行人重识别的分析研究, 第九届中国信息融合大会,中国,太原, 2019, 9月24日-25日: 516-524.
[1] 张帆, 柴琳等. A review of research on micro-expression recognition algorithms based on deep learning. Neural Computing and Applications, 2024, 36(29): 17787-17828. 10.1007/s00521-024-10262-7. (EI收录)
[2] 雷子力, 柴琳, 马游, 张雨成等. DAC-SaNet: Improved Skip Connections in U-Net for Medical Image Segmentation. The conference at which the Contributor proposes to present the Content,titled: Jiangsu Annual Conference on Automation JACA 2024, Nanjing, Jiangsu Province, China, 2024, Nov. 22-25: in press. (EI刊源)
[3] 汤骁宇, 柴琳等. MoB-NetV2-RVFL: Diagnosis of Coronavirus (COVID-19) from CT images via a Deep Learning Architecture. The conference at which the Contributor proposes to present the Content,titled: Jiangsu Annual Conference on Automation JACA 2024, Nanjing, Jiangsu Province, China, 2024, Nov. 22-25: in press. (EI刊源)
[4] 王思越, 柴琳, 金立左等. Recognition of Facial Movement Disorders Based on Temporal Convolutional Neural Network, the 35th Chinese Control and Decision Conference, CCDC 2023, May 20-22: 5273-5278. (EI收录)
[5] 李传春, 金立左, 柴琳.基于面部动作单元的面部运动异常识别, 第九届中国信息融合大会,中国,太原, 2019, 9月24日-25日: 511-515.
人体动作识别与重建方面:
[1] 陈晨, 柴琳. Multi-attention graph convolutional network for skeleton-based action recognition. Proceedings of the 36th Chinese Control and Decision Conference, CCDC 2024: 6190-6195.(EI收录)
[2] 薛云帆, 柴琳. MSFF-GAN A Refined Method for Human Video Motion Transfer. Proceedings of the 36th Chinese Control and Decision Conference, CCDC 2024: 4416-4421.(EI收录)
[3] 刘景, 柴琳, 金立左. Human posture recognition based on wearable sensor, the 35th Chinese Control and Decision Conference, CCDC 2023, Yichang, China, 2023, May 20-22: 1553-1558. (EI收录)
智能制造与工业检测方面:
[1] 亓霈, 柴琳等. Unsupervised Industrial Anomaly Detection Based on Feature Mask Generation and Reverse Distillation. Chinese Journal of Information Fusion, 2024, 1(2): 160-174.
[2] 曹国平, 柴琳等.DR-CIML: Few-shot Object Detection via Base Data Resampling and Cross-iteration Metric Learning. APPLIED ARTIFICIAL INTELLIGENCE, 2023,37(1). https://doi.org/10.1080/08839514.2023.2175116
[3] 浦唐飞, 金立左, 柴琳, 费树岷. Design of Industrial Network Topology Discovery Algorithm Based on Multi-protocol, the 35th Chinese Control and Decision Conference, CCDC 2023, Yichang, China, 2023, May 20-22: 3973-3979. (EI收录)
智能电网预测与优化应用方面:
[1] 陈聪聪, 柴琳等. Research on stacking ensemble method for day-ahead ultra-short-term prediction of photovoltaic power, Renewable Energy, 2025, in press. (中科院、JCR 1区)
[2] 程旭冉, 柴琳. Evaluation of Smart Energy System Based on Machine Learning, Proceedings of 2021 IEEE 10th Data Driven Control and Learning Systems Conference, DDCLS 2021, China, Suzhou, 2021, May 14-16: 1564-1570. (EI收录)
专利:
[1] 金立左, 张向向等. 基于多分辨自动编码器的光学符号识别方法, CN112818978A, 2021-05-18.
[2] 金立左, 屠实,马游等. 手机盗拍行为在线自动识别告警方法, CN115205786A, 2022-10-18.
[3] 熊伟, 金立左, 马游等. 人车计数方法、装置、设备与计算机可读存储介质, CN113378745A, 2021-09-10.
软著:
[1]柴琳,杨湘华等. 基于django框架的云道数据展示平台[简称:云道数据展示平台]V1.0, 2024SR0227799, 2023-09-01.
[2] 柴琳,蒋健等. 云道数字化工厂PCBA板卡测试工具软件V1.0, 2023SR1089301, 2023-07-01.
联系我们:
江苏省南京市四牌楼2号中心楼 东南大学自动化学院
电话:025-83792724
邮箱:jupiter@seu.edu.cn

