日前,东南大学自动化学院温广辉教授团队在系统与控制领域国际顶刊《Automatica》上在线发表了题为“Distributed optimal coordination of multi-agent systems with coupled objective functions: A fixed-time estimation-based approach”的论文(长文),该论文报道了多智能体系统在具有耦合目标函数情况下的分布式最优协同的最新研究成果。
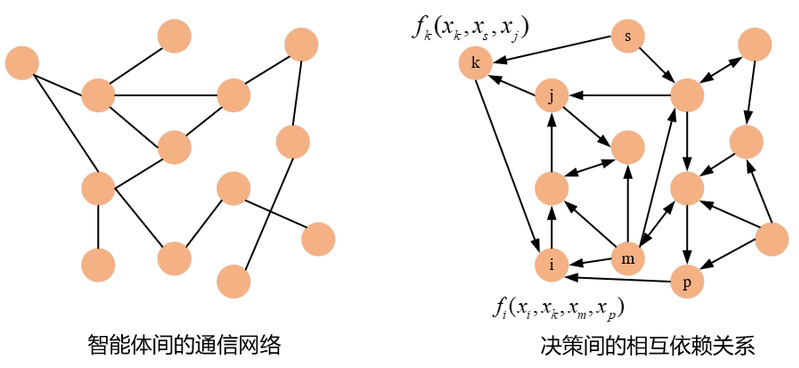
多智能体系统的分布式最优协同研究具有重要的理论意义和广泛的应用价值。在实际协同任务中,每个智能体的决策不仅影响自身的目标函数,还可能通过网络化的复杂耦合关系对其他智能体的局部目标函数产生影响。具体而言,每个智能体的局部目标函数是由网络中多个(可能包括非通信邻居)智能体的决策耦合而成的。这种决策间的相互依赖性真实地反映了群体智能系统的核心特征。研究此类问题有助于突破传统分布式优化中目标函数相互独立的局限性,为复杂系统的协同决策提供全新的思路和方法。
本文创新性地将非合作博弈与协同优化理论框架相结合,系统地研究了每个智能体的局部目标函数显式依赖于其他智能体决策的最优协同问题。与现有广泛研究的一致性优化问题不同,这项工作着重刻画了智能体的个体特性及其决策间的相互依赖性。为应对不完全信息条件下决策耦合所带来的挑战,本文提出了一种基于固定时间估计的分布式鲁棒最优协同算法。该算法采用分阶段设计方法,在固定时间内克服外部扰动的影响,实现对全局决策变量及聚合偏导数的精确估计,并在固定时间之后实现与集中式算法相当的收敛性能。此外,本文提出的算法展现出进一步扩展的潜力,有望应用于解决多联盟博弈中的分布式固定时间纳什均衡搜索问题。

东大学自动化学院博士后房肖为本文第一作者,温广辉教授为本文通信作者,东南大学自动化学院为本文第一作者单位和通信单位。该论文得到了国家重点研发计划、国家杰出青年科学基金、国家自然科学基金联合重点等项目的资助。《Automatica》是国际自动控制联合会(IFAC)旗下的高水平学术期刊,也是系统与控制领域的国际顶级期刊。
本文链接:https://www.sciencedirect.com/science/article/pii/S0005109825001050

