东南大学在分布式优化领域取得重要研究进展,相关成果以常文形式发表于《IEEE Transactions on Automatic Control》期刊
近期,自动化学院王翔宇副教授和李世华教授在多智能体系统分布式优化控制研究方面取得重要进展,相关成果“Distributed finite-time optimization for integrator chain multi-agent systems with disturbances”以常文(Full Paper)形式发表于自动控制领域国际顶级期刊《IEEE Transactions on Automatic Control》(2020, 65(12): 5296-5311)。论文第一作者为王翔宇副教授,第二作者为博士生王国栋,通讯作者为李世华教授,东南大学为唯一完成单位。
分布式优化控制是多智能体系统协调控制和复杂网络系统控制领域中的一类重要问题。相比于传统的协调控制问题,分布式优化控制问题更为复杂:其一,该类问题要求系统中的个体不仅要完成协调任务,还要使某些关键指标极小化,如成本、能耗、误差等;其二,由于指标函数和约束条件的存在,常用的协调控制设计和分析方法难以直接用于解决分布式优化控制问题。目前,分布式优化控制领域仍存在诸多亟待解决的难题,其中两个重要问题就是分布式有限时间优化控制问题和抗干扰分布式优化控制问题。


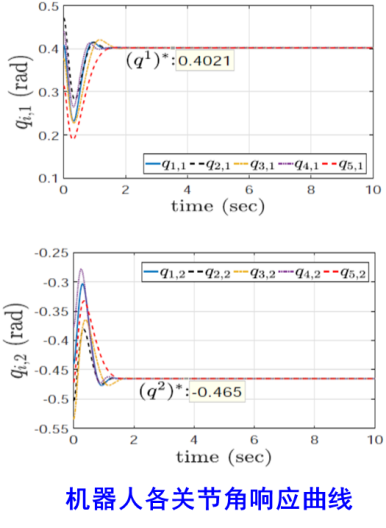
论文以受扰异构多智能体系统为研究对象,利用非光滑和抗干扰控制方法构建了“非光滑嵌入式分布式优化控制”框架。该框架将分布式优化控制设计拆分为两个子部分,即虚拟优化信号发生器设计和各智能体局部优化参考信号跟踪控制器设计。该框架突破了传统的递推式控制设计思路(尤其是针对高阶系统),有效简化了控制设计的复杂度。论文结果适用于包括一阶、二阶和高阶智能体动态在内的多类异构多智能体系统,为分布式有限时间优化控制问题提供了一条通用性强的解决途径,丰富和完善了分布式优化的理论和方法研究体系。此外,论文所提控制方法还成功应用于多液压机器人的优化对准控制方法设计,并有望推广应用于微电网经济调度等其他实际问题中。
《IEEE Transactions on Automatic Control》是IEEE控制系统学会主办的自动控制领域最高水平学术期刊之一,其常文录用率低,发表难度大。以上工作得到了国家自然科学基金面上项目、江苏省自然科学基金优秀青年基金和东南大学至善青年学者支持计划(A类)等项目的资助。

