运动控制与电力电子系统国际研讨会于9月26日在东南大学四牌楼校区礼东楼春晖堂举行。本次会议由IEEE 工业电子协会南京分会、东南大学自动化学院、复杂工程系统测量与控制教育部重点实验室、江苏省自动化学会伺服与运动控制专委会以及江苏省电工技术学会自动化委员会共同主办,并得到了东南大学“控制科学与工程”双一流学科建设经费和国家自然科学基金的支持。会议由江苏省自动化学会秘书长、东南大学自动化学院副院长李世华教授和学会秘书、东南大学自动化学院王翔宇副教授共同主持。会议邀请了IEEE Fellow、日本名古屋工业大学Makoto Iwasaki教授,IEEE Fellow、南京航空航天大学阮新波教授,中南大学粟梅教授,山东省杰青、泰山学者青岛大学于金鹏教授,国家级青年人才计划入选者山东大学张桢滨教授,江苏省杰青东南大学王政教授,浙江大学杨秦敏教授,合肥工业大学杨淑英教授共8位专家做了主题报告。来自省内外高校自动化领域的教师、学生共100余人参加了本次学术会议。
9月26日上午8:50,会议在四牌楼礼东楼春晖堂开幕,开幕式由李世华教授主持。李世华教授发表了致辞,对本次大会的顺利召开表示了衷心祝贺,并对省内外各位代表的光临表示了最热烈的欢迎。

李世华教授主持开幕式
开幕式后,名古屋工业大学Makoto Iwasaki教授,南京航空航天大学阮新波教授,中南大学粟梅教授,青岛大学于金鹏教授,山东大学张桢滨教授,东南大学王政教授,浙江大学杨秦敏教授,合肥工业大学杨淑英教授分别作了八场精彩的主题报告。
Iwasaki教授作了题为“鲁棒快速精密运动控制器设计:在机电一体化系统的应用”的学术报告。Iwasaki教授首先指出快速响应和高精度运动控制方法已成为包括微米/纳米级运动系统在内的各种高性能机电系统的必不可少的技术之一。目前在数据存储设备,机床,电子元件的制造工具得到了广泛应用。并且,该方法在性能上具有抗干扰或不确定性的鲁棒性,机械振动抑制能力以及对机构变化的适应能力。报告人还介绍了快速而精确的运动控制技术,阐明了两自由度控制结构中每个组件的实际问题和相关解决方案,并举例说明了工业高精度定位设备的控制器设计。

Iwasaki教授报告
接下来,南京航空航天大学阮新波教授作了题为“级联式DC-DC转换器系统:稳定性标准和解决方案”的报告。在报告中阮教授着重介绍了级联DC-DC转换器可分类为总线电压控制转换器(BVCC)或总线电流控制转换器(BCCC),并可通过应用奈奎斯特判据给出级联DC-DC转换器系统的稳定性条件。同时,阮教授还介绍了多种保证系统稳定性以及降低功率损耗的方法,并通过仿真、实验效果对比展示了所介绍方法的优越性。

阮新波教授报告
中南大学粟梅教授以“级联逆变器的分布式控制及其潜在应用”为题作了报告,以目前大部分级联转换器通常采用的多级调制技术为切入点,指出了其会对中央处理器带来巨大的计算负担。鉴于此,粟梅教授提出了一种级联逆变器的分散控制方法,成果解决了模块之间的自主电压平衡和频率同步等问题。

粟梅教授报告
青岛大学于金鹏教授在题为“智能自适应反步控制及其在电机驱动系统中的应用”的报告中介绍了其团队在智能控制及在电机驱动系统中应用的研究成果,其主要以模糊逻辑系统/神经网络用于逼近非线性动态,以克服建模和参数对系统的不确定性,并采用自适应技术用于估计未知参数,给出了一种结构简单,自适应参数较少的反步控制方法。

于金鹏教授报告
下午,山东大学张桢滨教授以“并网转换器和驱动系统的模型预测控制”为题,首先系统地介绍了整个模型预测控制地发展概况,指出了模型预测控制在其动态性能,多目标包含能力和优化地灵活性具有突出的优势。之后,张教授介绍了其目前在电力电子设备,电力驱动器和新能源电力转换器的预测控制方面取得的成果。

张桢滨教授报告
东南大学王政教授在题为“双三相永磁同步电动机驱动器的调制与控制技术”的报告中介首先介绍了双三相电机驱动器的优点,其可避免使用平衡阻抗,隔离循环电流,并具有低转矩波动,更大的控制自由度和较高的容错能力。之后,介绍了其团队在双三相永磁同步电动机驱动器的调制和控制技术的最新发展,包括改善操作性能以及故障诊断和容错操作。

王政教授报告
浙江大学杨秦敏教授以“风能控制设计的理论研究与实践”为题,系统全面地介绍了大型风力涡轮机系统及其控制设计和实践。讨论了目前控制界内在高可靠度和高效利用风能方面所面临的挑战,包括大型风力涡轮机的建模与仿真以及其鲁棒控制方案的设计。

杨秦敏教授报告
合肥工业大学杨淑英教授作了“永磁同步电机驱动器的转子位置估计和电流控制”的报告。首先点明在电动汽车(EV)和混合电动汽车(HEV)受到越来越多的关注背景下,电动驱动在一定程度上将起到推动作用。之后,围绕两个方面进行介绍,即转子位置的估计以及在较宽的速度范围内对磁化电流和转矩产生电流的解耦控制。具体讨论了:1) 静止和低速位置估计的高频信号注入方法;2) 在中,高速范围内基于SMO的转子位置估计;3) 一种实现从一种方法到另一种方法的平稳切换的方法;4) ESO旨在整体上估计定子电阻压降,交叉耦合项,内部不确定性和外部干扰,从而使两个子系统在控制本质上能够完全解耦。
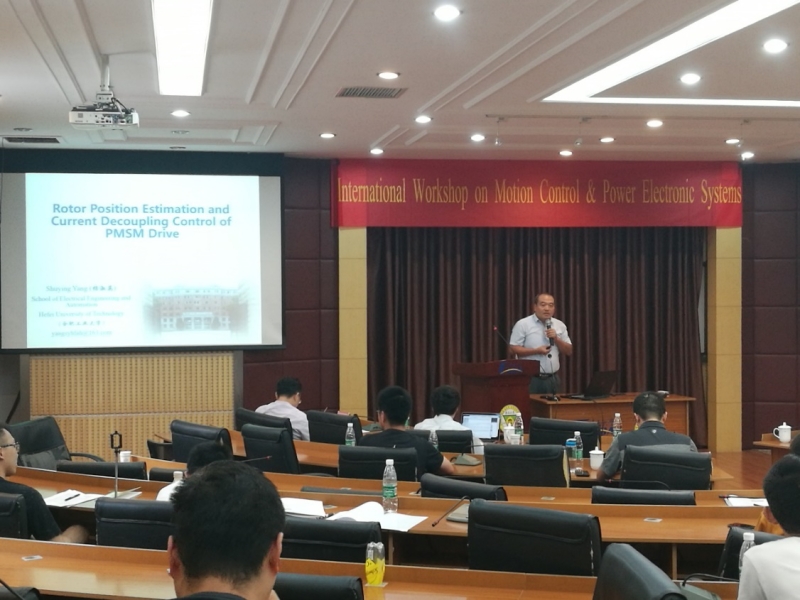
杨淑英教授报告


现场讨论

Iwasaki教授致闭幕辞
会议过程中,学者们围绕自己的研究领域,分享了各自的研究进展和科研心得,和师生们进行了深入的交流与探讨,现场气氛热烈。最后,Makoto Iwasaki教授和李世华教授先后作了大会闭幕致辞。本次会议的学术报告既有理论高度,又有专业趋向,受到与会者的一致好评。会议的成功举办为扩大东南大学自动化学科的国内影响、推动东南大学“控制科学与工程”一流学科建设和提升江苏省自动化学会学术特色学会的能力建设水平,均起到了积极作用。(王翔宇、王心明供稿)

运动控制与电力电子系统国际研讨会合影留念

